
벨로다인의 포인트클라우드는 (X, Y, Z, I)로 이 데이터에는 가속도 값이 없다.
라이다를 기울이면 데이터 값도 기운다.
이를 해결하기 위해선 IMU를 통해 Xa, Ya, Za를 구해야 한다.
(X, Y, Z, I, Xa, Ya, Za) <- 이런식으로.
VLP16은 이론적으로 100m까지 스캔할 수 있다.
윈도우에서는 보통 VeloView라는 프로그램을 이용해 밸로다인을 많이 쓰는 것 같아 다운 받아보았다.
https://www.paraview.org/veloview/
VeloView | ParaView
VeloView can playback pre-recorded data stored in .pcap files, and can record live stream as .pcap file. The sensor sweeps an array of lasers (16, 32, 64, 128) 360° and a vertical field of view of 40°/20° with 5-20Hz and captures about a million points
www.paraview.org
설치는 위 링크에서 진행했다.
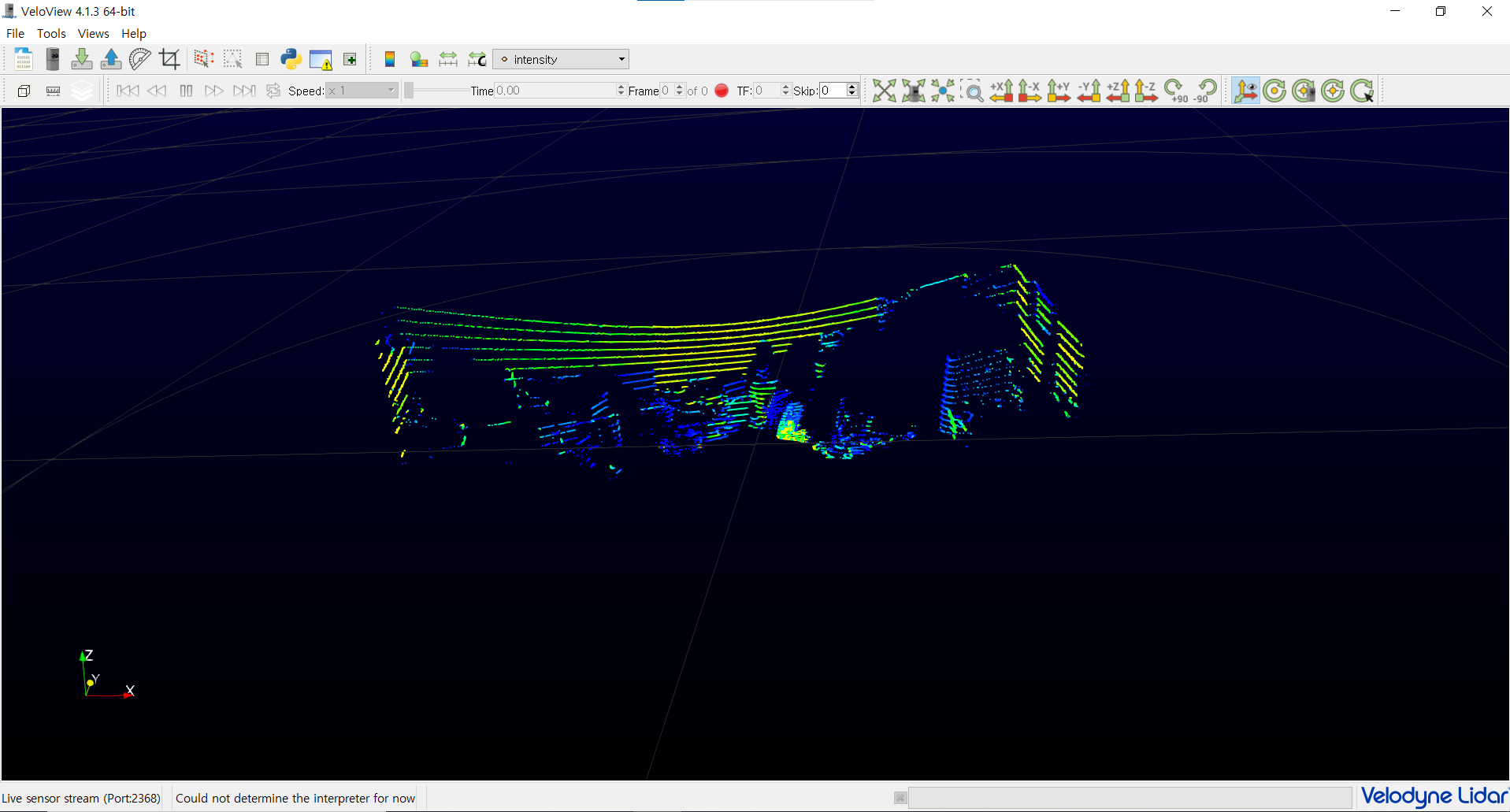
실행 모습이다.

왼쪽 위에 있는 저 아이콘을 클릭한 뒤 자신의 라이다에 맞는 걸 선택하면 위의 창처럼 뜬다.
'Sensors > Lidar' 카테고리의 다른 글
| [RPLidar] closest distance publisher on ROS melodic (0) | 2022.09.04 |
|---|---|
| [Lidar] 라바콘 인식 영상 (0) | 2022.09.01 |
| [Lidar] MATLAB으로 Velodyne VLP16 Lidar 제어하기 (0) | 2022.08.25 |
벨로다인의 포인트클라우드는 (X, Y, Z, I)로 이 데이터에는 가속도 값이 없다.
라이다를 기울이면 데이터 값도 기운다.
이를 해결하기 위해선 IMU를 통해 Xa, Ya, Za를 구해야 한다.
(X, Y, Z, I, Xa, Ya, Za) <- 이런식으로.
VLP16은 이론적으로 100m까지 스캔할 수 있다.
윈도우에서는 보통 VeloView라는 프로그램을 이용해 밸로다인을 많이 쓰는 것 같아 다운 받아보았다.
https://www.paraview.org/veloview/
VeloView | ParaView
VeloView can playback pre-recorded data stored in .pcap files, and can record live stream as .pcap file. The sensor sweeps an array of lasers (16, 32, 64, 128) 360° and a vertical field of view of 40°/20° with 5-20Hz and captures about a million points
www.paraview.org
설치는 위 링크에서 진행했다.
실행 모습이다.
왼쪽 위에 있는 저 아이콘을 클릭한 뒤 자신의 라이다에 맞는 걸 선택하면 위의 창처럼 뜬다.
'Sensors > Lidar' 카테고리의 다른 글
| [RPLidar] closest distance publisher on ROS melodic (0) | 2022.09.04 |
|---|---|
| [Lidar] 라바콘 인식 영상 (0) | 2022.09.01 |
| [Lidar] MATLAB으로 Velodyne VLP16 Lidar 제어하기 (0) | 2022.08.25 |