
How to use RPLidar on ROS Melodic:
https://softwaretester.info/rplidar-a1-with-ros-melodic-on-ubuntu-18-04/
RPLidar A1 with ROS Melodic on Ubuntu 18.04 – – Softwaretester –
If you are (for example) an owner of NVIDIA Jetson Nano Developer Kit and RPLidar, you can use ROS Melodic to realize obstacle avoidance or simultaneous localization and mapping (SLAM). Here is a beginner’s tutorial for installing the necessary software.
softwaretester.info
sudo chmod 0666 /dev/ttyUSB0
Running RPLidar command
roslaunch rplidar_ros view_rplidar.launch
Open source 'Object Detection using RPLidar'
Thank you to omkarChinchkar.
https://github.com/omkarChinchkar/ObjectDetectionUsingRPLidar/blob/main/rplidar_scan_trial.py
GitHub - omkarChinchkar/ObjectDetectionUsingRPLidar: This repository contains the code for detection objects in the surrounding
This repository contains the code for detection objects in the surrounding using RPLidar sensor. - GitHub - omkarChinchkar/ObjectDetectionUsingRPLidar: This repository contains the code for detect...
github.com
Modify code to publish min_distance topic.
#!/usr/bin/env python
import rospy
import math
import numpy
import os
from std_msgs.msg import String
from std_msgs.msg import Float32
from sensor_msgs.msg import LaserScan
def callback(msg):
os.system('clear')
print("**********************Recordings for one Object***********************")
list_till_min=[]
list_after_min=[]
#Finding distance between Lidar and closest object
min_distance = min(msg.ranges)*100
# print("\n")
print("Distance of closest object is ",min_distance," cm")
#made by me
pub=rospy.Publisher('min_distance', Float32, queue_size=10)
pub.publish(min_distance)
# Finding angle corresponding to closest object
for i in range(0,len(msg.ranges)):
list_till_min.append(msg.ranges[i]*100)
if min_distance==msg.ranges[i]*100:
break
index_till_min=i
angle=i*0.017
#print('angle values:',angle)
# converting angle in degrees
print('Angle of closest object is :',(numpy.degrees(angle))," degrees")
# To get points across length/width of an obstacle
for j in range(index_till_min+1,len(msg.ranges)):
list_after_min.append(msg.ranges[j]*100)
l1_string = ', '.join(map(str, list_till_min))
length_of_l1_string = len(l1_string)
last_index_of_inf1 = l1_string.rfind('inf')
substring_till_min_values = l1_string[last_index_of_inf1+5:length_of_l1_string]
list_till_min_values = substring_till_min_values.split(", ")
#Converting list of strings to list of float
for i in range(len(list_till_min_values)):
list_till_min_values[i]=float(list_till_min_values[i])
# To get points across length/width of an obstacle
l2_string = ', '.join(map(str, list_after_min))
length_of_l2_string = len(l2_string)
last_index_of_inf2 = l2_string.find('inf')
substring_after_min_values = l2_string[0:last_index_of_inf2-5]
list_after_min_values = substring_after_min_values.split(", ")
#Converting list of strings to list of float
for i in range(len(list_after_min_values)):
list_after_min_values[i]=float(list_after_min_values[i])
#print('list till minimum values: ',list_till_min_values)
#print('list after minimun values: ',list_after_min_values)
# To find angle for d1 and d2
d1_angle=len(list_till_min_values)*0.017
side1=pow(pow(list_till_min_values[0],2)+pow(min_distance,2)-2*list_till_min_values[0]*min_distance*math.cos(d1_angle),0.5)
d2_angle=len(list_after_min_values)*0.017
side2=pow(pow(list_after_min_values[len(list_after_min_values)-1],2)+pow(min_distance,2)-2*list_after_min_values[len(list_after_min_values)-1]*min_distance*math.cos(d2_angle),0.5)
################# for I-Shaped Obstacle############################
if(abs(list_till_min_values[0]-list_till_min_values[len(list_till_min_values)-1])<2 and abs(list_after_min_values[0]-list_after_min_values[len(list_after_min_values)-1])<2):
print("I Shape Object, Length/Width is ",side1+side2," cm")
elif(side1<side2):
print("Width is ",side1," cm")
print("Length is ",side2," cm")
else:
print("Length is ",side1," cm")
print("Width is ",side2," cm")
def rplidar_scan_trial():
rospy.init_node('rplidar_listener') #Initializing subscriber node
rospy.Subscriber('/scan', LaserScan, callback)
rospy.spin()
if __name__ == '__main__':
rplidar_scan_trial()The result
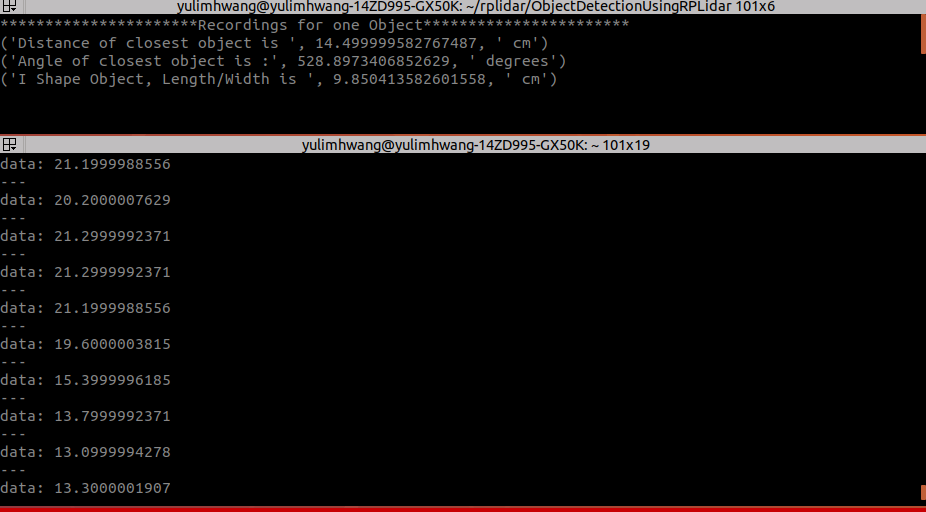
Second terminal is the result to 'rostopic echo min_distance'
'Sensors > Lidar' 카테고리의 다른 글
| [Lidar] 라바콘 인식 영상 (0) | 2022.09.01 |
|---|---|
| [Lidar] MATLAB으로 Velodyne VLP16 Lidar 제어하기 (0) | 2022.08.25 |
| [Lidar] Velodyne VLP16과 VeloView (0) | 2022.08.25 |